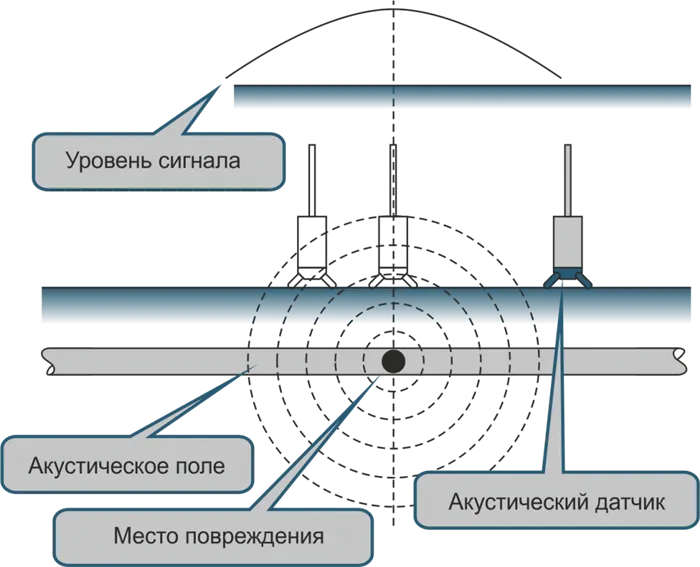
Акустический метод работает со следующей последовательностью отдельных процессов обнаружения неисправностей в CL: Сначала определяется зона повреждения с помощью виброразряда, импульсного метода или метода петли, в зависимости от типа повреждения.
Акустическая коммуникация
Акустическая связь находится между оптической и химической связью. Как и визуальные сигналы, звуки, издаваемые животными, являются средством передачи информации о чрезвычайных ситуациях. Их действие ограничено временем текущей активности животного, передающего сообщение. Очевидно, не случайно выразительные движения животных в очень многих случаях сопровождаются соответствующими звуками. В отличие от визуальных сигналов, слуховые сигналы могут передаваться на расстояние без какого-либо визуального, тактильного или обонятельного контакта между партнерами. Слуховые сигналы, как и химические, могут действовать на больших расстояниях или в полной темноте. Однако они отличаются от химических сигналов тем, что не имеют долгосрочного эффекта.
Таким образом, акустические сигналы животных являются экстренным средством коммуникации для передачи сообщений как при наличии прямого визуального и тактильного контакта между партнерами, так и при его отсутствии. Дальность передачи акустической информации определяется четырьмя основными факторами:
- 1) объем,
- 2) частота сигнала,
- 3) акустические свойства среды, через которую передается сообщение,
- 4) пороги слышимости животного, принимающего сигнал.
Звуковые сигналы на больших расстояниях известны насекомым, амфибиям, птицам и многим видам средних и крупных млекопитающих.
Распространение звука — это волнообразный процесс. Источник звука передает колебания окружающим частицам, которые, в свою очередь, передают колебания соседним частицам, создавая серию чередующихся сжатий и разжатий с увеличением и уменьшением давления воздуха. Эти движения частиц графически представлены в виде серии луковиц, пики которых соответствуют сжатиям, а промежуточные впадины — разрежениям. Скорость этих волн в данной среде — это скорость звука. Количество волн, проходящих через точку пространства в секунду, называется частотой звука. Ухо животного вида воспринимает звук только в ограниченном диапазоне частот или длин волн. Волны с частотой ниже 20 Гц воспринимаются не как звук, а как вибрация. Вибрации свыше 20 000 Гц (так называемые ультразвуковые частоты) также недоступны человеческому уху, но воспринимаются ушами некоторых животных. Другой характеристикой звуковых волн является интенсивность или громкость звука, которая определяется расстоянием пика или впадины волны от центральной линии. Интенсивность также является мерой энергии звука.
Слуховой анализатор
Ухо млекопитающих состоит из трех частей — наружного, среднего и внутреннего уха, которые связаны со слуховой зоной коры головного мозга посредством слухового нерва и образуют слуховой анализатор.
Наружное ухо используется для определения слуха. Он собирает звуковые волны и передает их в нижележащие отделы уха, а также служит локализатором для сбора и направления звука. Наружное ухо состоит из пинны с ее двигательным аппаратом и наружного слухового прохода. На дне наружного слухового прохода находится барабанная перепонка, которая отделяет наружное ухо от среднего. Это тонкий листок соединительной ткани, который простирается между костными стенками слухового прохода.
Среднее ухо состоит из барабанной полости с расположенными в ней четырьмя косточками и евстахиевой трубы.
Среднее ухо связано с окружающей средой через специальное отверстие, которое соединено с ушным каналом. Это имеет огромное значение. Когда слышен сильный звук, звуковая волна достигает барабанной перепонки через наружный слуховой проход и Евстахиеву трубу. Давление, оказываемое на барабанную перепонку снаружи и изнутри, одинаково и препятствует ее разрыву. В барабанной полости есть два окна — круглое и овальное. Круглое окно, закрытое фиброзной мембраной, отделяет барабанную полость от тимпанической полости. Овальное окно расположено на краю вестибулярной лестницы и закрывается стремечком.
Косточки, молоточек, обтуратор, стремечко и хрусталик соединены суставами и связками, прикрепленными к стенке барабанной полости; вместе с натяжением барабанной мембраны и стремечковой мышцы они служат вместилищем для слуховой системы.
Звуковые волны улавливаются мочкой уха и проходят через слуховой проход к барабанной перепонке. Это мембрана, которая вибрирует при попадании на нее звуковых волн и поэтому является первым звеном звукового преобразователя. Эти колебания в среднем ухе усиливаются и передаются на рецепторные клетки во внутреннем ухе.
Молоток соединен рукой с перепонкой, а другим концом — с наковальней, которая, в свою очередь, соединена со стременем. Вибрации молоточка, возникающие в соответствии с колебаниями барабана, передаются через наковальню на стремя, которое расположено у отверстия овального окна, ведущего к внутреннему уху. Овальное окно в 18 раз меньше барабанной перепонки, поэтому кости среднего уха действуют как усилитель, увеличивая давление, оказываемое на барабанную перепонку, в 18 раз. Чтобы предотвратить повреждение внутреннего уха от громких звуков, к молоточку и луковице прикреплены специальные мышцы, которые путем сокращения отодвигают кости от барабанной перепонки и овального окна. Звук может достигать внутреннего уха, но громкость звука значительно снижается.
Внутреннее ухо расположено в каменистой части каменной кости в височной области черепа и представлено костным лабиринтом с мембранным лабиринтом внутри. Рецептивная часть слухового органа, спиральный или корковый орган, находится в мембранозном лабиринте.
Звуковые сигналы
Высота и частота звуков зависят от образа жизни животных. Например, низкочастотные звуки лучше всего проникают через густую растительность; к этому типу сигналов обычно относятся призывы птиц тропических лесов и обезьян, населяющих эти леса. Звуки, издаваемые многими животными, специально разработаны для того, чтобы быть услышанными на больших расстояниях. Распространение звука также зависит от способа его производства. Наземные птицы поют свои песни, выбирая самую высокую точку на земле («позиция песни»), что повышает эффективность их распространения. Птицы открытых ландшафтов, такие как колпицы и луговые жаворонки, поют, летая высоко над местом гнездования. В воде звуки распространяются с меньшим затуханием, чем в воздухе, поэтому водные животные широко используют их для общения. Рекорд по дальности акустической связи между животными принадлежит китам: их «песни» могут быть услышаны другими китами на расстоянии нескольких десятков километров.
Акустическая коммуникация важна для размножения. Например, рев самцов северных оленей стимулирует сексуальность самок и синхронизирует половое созревание.
Если у оленей в брачный сезон ревут только самцы, то у лисиц и кошек это делают и самцы, и самки. У оленей самка оленя отмечает свою позицию первой, за ней следует самец оленя.
Средства слуховой коммуникации, характерные для представителей семейства собачьих, большинство исследователей делят на две группы: Контактное и дистанционное общение. К контактным сигналам относятся рычание, скуление, фырканье, фырканье и визг. Эти сигналы подаются животными в ситуациях, когда они находятся в непосредственном контакте друг с другом. Хрюканье — это первый сигнал, который появляется у щенков. Хрюканье — это, по сути, реакция на дискомфорт. Взрослые животные скулят в ответ на боль, социальную изоляцию, дружеское взаимодействие и нетерпение. Скуление является сигналом боли и в большинстве случаев предотвращает агрессию со стороны агрессора. Рычание собаки при агрессивном взаимодействии — это сигнал угрозы. Значительная часть игр, особенно щенков, сопровождается рычанием. Рычание обычно издают животные, которые насторожены. У домашних собак или одомашненных животных эти сигналы часто направлены на человека и могут быть просьбой о контакте, признаком нетерпения или просьбой о чем-то. Для каждого из этих звуков существует несколько конфигураций.
Сигналы на расстоянии включают лай и вой. В разных ситуациях собаки лают совершенно по-разному. Лай может различаться по тону, громкости и частоте. Внимательный владелец собаки почти всегда может отличить характерный лай от лая. Охотник, например, может с уверенностью сказать, какую дичь заметил его хаски, поскольку он будет лаять по-разному, будь то олень или медведь, белка или рябчик. Лай охотничьей собаки также значительно отличается при охоте на зайцев и лисиц, выслеживании и охоте «на месте». В целом, лай можно разделить на следующие категории: Лай разной интенсивности с разной степенью активной защитной реакции; лай разной интенсивности с разной степенью пассивной защитной реакции; лай для приветствия; лай во время игры; лай в помещении или на привязи; лай для привлечения внимания и т.д.
Вой — распространенное средство общения в семействе стайных собак. Его значение в жизни шакалов, волков и койотов многообразно. Специалисты по поведению волков считают, что волчий вой играет роль территориального маркера, то есть указывает на то, что группа волков находится на определенной территории. Волки и шакалы подзывают своих сородичей воем (рис. 4.6).
Акустический метод работает со следующей последовательностью отдельных процессов обнаружения неисправностей в CL: Сначала определяется зона повреждения с помощью виброразряда, импульсного метода или метода петли, в зависимости от типа повреждения.
Акустический сигнал в грунте
Акустический сигнал на земле довольно быстро ослабевает, и диапазон определения места повреждения акустическим методом ограничен несколькими десятками метров при типичной глубине залегания кабеля. В лучшем случае это сто метров. Ограничения связаны со свойствами грунта, энергией разряда и чувствительностью используемого оборудования.
Очевидно, что необходимым условием для возникновения электрического пробоя является наличие достаточно высокого электрического сопротивления в МП кабеле. Если есть сопротивление, то существует «риск краха». Отсутствие сопротивления (короткое замыкание) — при подаче импульса напряжения возникает импульс тока, но нет электрического разряда и, следовательно, нет звукового сигнала. Практика показывает, что сопротивление должно быть не менее нескольких десятков Ом. Это ограничение определяет типы неисправностей, которые могут быть обнаружены акустическим методом, т.е. область применения метода. Это утечки изоляции, «плавающие» повреждения, однофазные и межфазные повреждения с различным сопротивлением контактов, одно-, двух- или всепроводниковые повреждения.
Схемы подключения генератора к кабелю
Для создания разряда необходимо специальное оборудование, т.е. генераторы импульсов, которые могут производить сильные электрические разряды. Энергия, необходимая для создания разряда, накапливается в достаточно большой электрической емкости и подается в кабель через выключатель или проводник. Многолетний опыт использования генераторов перенапряжений показал, что в большинстве случаев достаточно энергии до 2000 джоулей. Использование импульсных генераторов с энергией более 3000 джоулей может быть опасным для кабеля, так как очень высокие импульсные токи генерируют очень сильные магнитные поля в момент разряда, которые сопровождаются сильным механическим воздействием на структуру кабеля.
Система обнаружения повреждений зависит от типа повреждения кабеля. Если произошло «плавающее» повреждение (обычно в муфтах), то сопротивление в месте повреждения высокое — единицы и десятки мегаом. Напряжение доводится до точки пробоя с помощью генератора. Для неподвижных повреждений, имеющих в месте повреждения контактное сопротивление от омов до десятков килоом, используются генератор, диссипатор и накопитель (зарядная емкость) или емкость безвредных жил. Ограничитель перенапряжения посылает импульс высокого напряжения на поврежденную жилу кабеля, которая затем разрывается и подает акустический сигнал.
Подключения генератора к кабелю показаны на рисунках ниже:
Схемы подключения генератора к кабелю
Замыкание переменного тока Однофазное замыкание Обрыв сердечника
Сочетание с индукционным методом поиска
Вариант акустического метода поиска неисправностей в сочетании с индукционным методом может быть эффективен в сложных случаях, когда акустический сигнал слабый и имеет «нечеткий» отклик без четкого пикового уровня. Это затрудняет локализацию МП и значительно снижает точность обнаружения. Для реализации этого метода необходимо дополнить акустический приемник электромагнитным каналом, состоящим из магнитной антенны и усилителя. Магнитное поле, создаваемое разрядом, достигает магнитной антенны практически мгновенно, поскольку скорость его распространения сравнима со скоростью света (300 000 км/с). Скорость звука на земле измеряется сотнями метров в секунду. Измерив оба сигнала и задержку звукового сигнала по сравнению с магнитным сигналом, можно оценить расстояние до возмущения. Задержка уменьшается по мере приближения к МП и становится минимальной непосредственно над ним. Последовательность поиска такая же, как и при акустическом методе, но в дополнение к проверке (или вместо проверки) уровня акустического сигнала, который увеличивается по мере приближения к МП, проверяется задержка, которая уменьшается по мере приближения к МП.
Нестандартный вариант акустического метода обнаружения повреждения кабеля может быть использован, когда сопротивление на МП равно нулю, т.е. имеется короткое замыкание, и невозможно использовать индуктивный метод. Как упоминалось ранее, когда большие токи проходят через близко расположенные проводники, возникают мощные силы, которые притягивают или отталкивают эти проводники. Поскольку изоляция, разделяющая эти проводники, обладает определенной упругостью, она сжимается или растягивается (в зависимости от направления силы). Если ток импульсный, то механическое взаимодействие между элементами кабельной конструкции — проводниками или оболочками жил — также импульсное и взрывное. Ядра или оболочки ядра «ударяются» друг о друга. В этом случае также слышны щелкающие звуки — «шлепки». В отличие от «классического» случая с локальным разрядом и локальным акустическим «щелчком», в описываемом случае шум генерируется во всем токоведущем кабеле, т.е. до места повреждения. Это обстоятельство позволяет локализовать МП. Когда оператор слышит щелчок, он находится перед МП. После прохождения МП звук постепенно ослабевает и исчезает, поскольку в кабеле нет тока и, следовательно, нет механического взаимодействия для генерации звука. Точка, в которой уровень звука начинает уменьшаться, является МП. Конечно, уровень акустического сигнала в этом случае гораздо ниже, чем в случае сильного разряда, который практически возникает в точке на МП, и для успешного проведения метода требуется высокочувствительное оборудование.
Косточки, молоточек, обтуратор, стремечко и хрусталик соединены суставами и связками, прикрепленными к стенке барабанной полости; вместе с натяжением барабанной мембраны и стремечковой мышцы они служат вместилищем для слуховой системы.
Акустический метод контроля и поиска течей в трубопроводах
Наиболее распространенными авариями, происходящими на трубопроводах различного назначения, являются утечки. Они возникают при повреждении стенок трубопроводов и сопровождаются заполнением инспекционных шахт, подвалов и других объемов протекающей там средой. Для обнаружения таких утечек часто используется инфракрасная аэрофотосъемка. Однако невозможно избежать поиска точного места дефекта (утечки).
Утечка паров + затопление
Одним из основных методов обнаружения утечек, используемых специализированными организациями, является последовательная градация. Этот метод является очень дорогостоящим и трудоемким. Но это также неэффективно. В таких случаях лучше использовать специализированное оборудование, например, детекторы утечек. Они обеспечивают более точное обнаружение утечек при минимальных затратах времени.
Среди этих устройств наибольшей популярностью пользуются акустические течеискатели. К ним относятся корреляционные течеискатели и акустические методы.
Принцип работы ультразвуковых течеискателей основан на использовании двух датчиков, размещенных непосредственно на земле над трубопроводом. Датчики обнаруживают акустические сигналы от звуков воды, включая утечки. Они передают эти сигналы на центральный блок, с которым работает оператор. Проанализировав результаты шумов, оператор может определить место повреждения трубопровода.
Тестер утечек Stork 5 HL 5000 Тестер утечек
Второй датчик можно использовать для точного обнаружения утечек и сравнения уровней шума в разных точках трубопровода.
Измеритель уровня звука — недорогой прибор, который может приобрести любая организация. Однако недостатком является его зависимость от слуховых способностей оператора. То есть в данном случае важнейшим центром анализа является сам человек, и насколько у него развит музыкальный слух, тем эффективнее будет обнаружение аварийных утечек. Конечно, разработчики стараются улучшить дизайн устройства и оснастить его дополнительными звуковыми фильтрами. Но опять же, эффективность зависит от оператора.
Принцип работы течеискателей корреляционного типа
Операционная система этого устройства основана на двух датчиках вибрации. Они устанавливаются в зоне доступа, которая может быть подвалом, диспетчерской и т.д. Они регистрируют колебания воды в трубах и передают данные на регистрирующий блок, который автоматически обрабатывает полученную информацию. Звуковые сигналы фильтруются. Это обеспечивает отфильтровывание ненужных звуков и отфильтровывание наиболее важных. Затем информация анализируется, и пользователь получает точное местоположение утечки.
Чтобы более подробно понять принцип работы устройства, давайте рассмотрим, как оно работает при обнаружении утечки.
Рассмотрим случай, когда трубопровод (обозначенный точкой «B») подвергается импульсному удару (рис. 3a). Наша главная задача — определить точку удара (точку тяги). Удар по трубе приводит к излучению звуковых сигналов, в том числе и водой. Два датчика, A и C, прикрепленные к концам трубы, используются для регистрации этих сигналов. Датчик A регистрирует импульс сигнала через определенное время, который рассчитывается по следующей формуле
t1 = Ld / Vv, где: Vc — скорость распространения звука в воде; Ld — расстояние от точки удара до датчика «A». Датчик C регистрирует импульс сигнала через определенный промежуток времени, который рассчитывается по следующей формуле:
Исходя из полученных данных, нам необходимо узнать разницу в приходе волн. Поскольку мы не знаем время начала импульса.
τz = t2 — t1 = (L — 2Ld) / Vv Отсюда, после умножения на Vv, получаем: Ld = L/2 — Vv* τz/2(1)
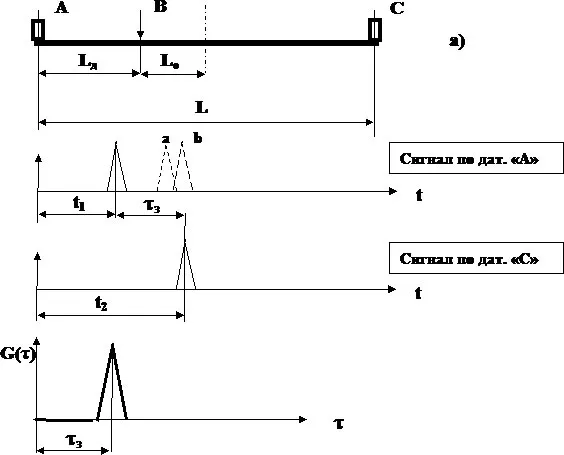
Рис. 3 Принцип локализации источников выбросов.
Поэтому для того, чтобы идентифицировать утечку (в нашем случае излучение), необходимо определить разницу во времени прихода волн (сигналов) по данным двух сигналов. Для автоматизации этих расчетов можно использовать взаимную корреляцию.
G(t) = 1/T*∫ f(t)* g (t- t) dt где: G(t) — значение взаимной корреляционной функции; f(t) — данные датчика «A»; g (t) — данные датчика «C».
Для иллюстрации практической функции взаимной корреляции построим график зависимости G от временного индекса τ (рис. 3).
В момент времени τ = 0 мы получаем произведение значений g и f в момент времени ti. Это делается для каждой временной точки. В результате мы имеем:
То есть, в графе G(τ) (рисунок 3) для τ=0, G(τ)=0.
Затем используется следующее значение τ= τi. Это эквивалентно временному сдвигу одного датчика относительно другого на величину τi. В данном примере значение корреляции G(τ) равно нулю до тех пор, пока график не совпадет с нижним. Значение G(τ) увеличивается до тех пор, пока импульс, считанный датчиком A, не совпадет с импульсом, зарегистрированным датчиком C.
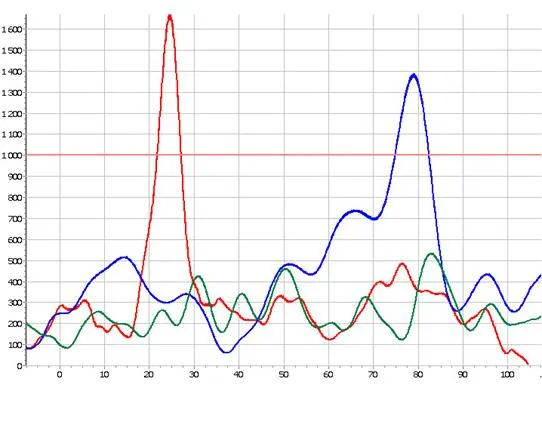
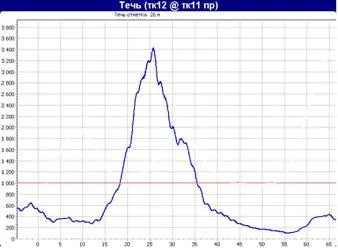
На этом основан принцип работы корреляционных течеискателей, где этот расчет отображается в виде графика. Ось Y показывает взаимную корреляцию (ее значение), а ось X — временную задержку от одного из датчиков, преобразованную в расстояние. Утечка определяется по наибольшему значению G(t).
Течь и её обнаруживаемость
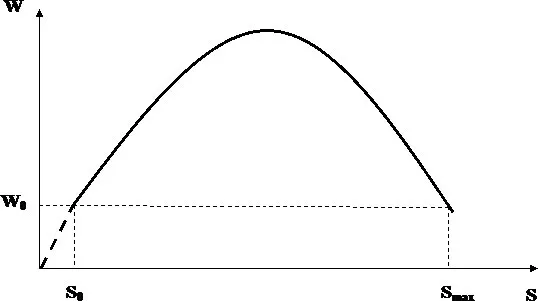
Уровень звукового сигнала, передаваемого через воду, также важен для точного обнаружения утечки. Согласно исследованиям (Н.С. Кузнецов), было установлено, что утечка генерирует три типа волн. Энергия излучения основной волны пропорциональна величине перепада давления, а также площади поперечного сечения дефекта в трубопроводе:
W ~ U 8 d 2 ~ ΔP 4 S где: U — скорость потока; d и S — диаметр и соответствующая площадь отверстия; ΔP — перепад давления: труба — свободное пространство.
Чем больше апертура утечки, тем четче эмиссионный сигнал. Когда размер апертуры достигает определенного значения, энергия сигнала может быть определена с помощью корреляционного детектора утечки. Важным фактором для обнаружения утечек являются также технические характеристики прибора, особенно его чувствительность.
Стоит также отметить, что увеличение акустического сигнала утечки способствует постепенному снижению давления в трубопроводе. Это приводит к постепенному ослаблению самого сигнала.
Это может привести к ослаблению сигнала, и устройство больше не сможет его принимать.
Поэтому при поиске небольших утечек и крупных разрывов трубопровода с помощью корреляционных течеискателей могут возникнуть проблемы с обнаружением сигнала.


Утечка до удаления изоляции Утечка после удаления изоляции
Рисунок 6. Снижение энергии сигнала из-за «ограничения» мощности через слои изоляции.

Рисунок 7. Луч не имеет свободного выхода.
По этой причине прибор не может обнаружить утечки в трубах с пенной изоляцией (труба к трубе с зазором).
Характеристики обнаружения ошибок
Вернемся к выражению (1) и рассмотрим коэффициент (Vb), который указывает на скорость звука в водной среде. Он напрямую связан с диаметром выхода утечки. Чем он меньше, тем он больше.
Когда происходит дефект (утечка), в большинстве случаев канал, в котором находится трубопровод, оказывается затопленным. Это создает две волны: снаружи и внутри трубы. Когда эти сигналы складываются вместе в точке обнаружения, прибор не может четко определить пик на коррелограмме (см. Рисунок 7).
Поэтому рекомендуется откачивать воду до обнаружения утечки.
Те же результаты могут быть получены и при утоньшении стенок трубы (см. рис. 8a). В таких случаях узкополосная фильтрация (рис. 8b) не дает желаемых результатов.
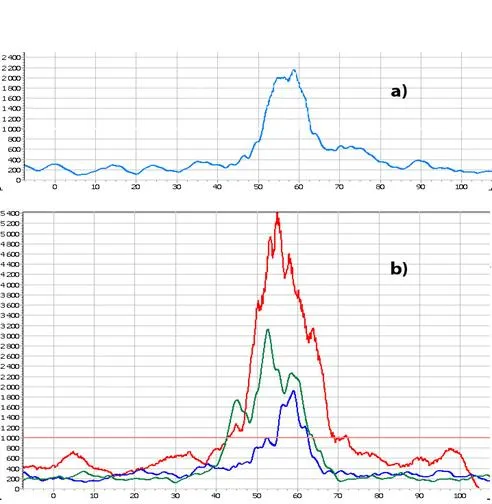
На практике, однако, это совсем не обязательно. Поскольку весь участок с дефектом (50-60 м на рис. инт.) должен быть отремонтирован.
Так называемая проблема PnP (Perspective-n-Point) используется в оптическом слежении для определения положения объекта в пространстве, при этом перспективная проекция объекта в плоскости сенсора камеры используется для определения положения объекта в трехмерном пространстве.
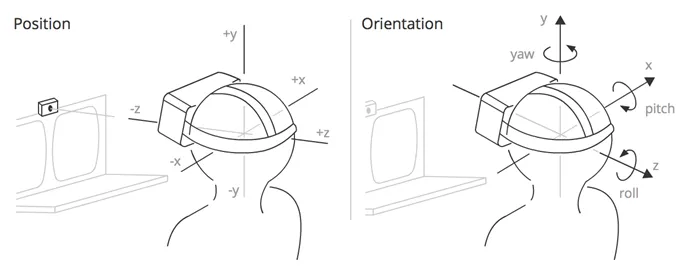
Инерциальный трекинг
Современные инерциальные измерительные системы (IMU), основанные на технологии MEMS, позволяют отслеживать ориентацию (крен, тангаж, тангаж) в пространстве с высокой точностью и минимальными задержками.
Благодаря алгоритмам «слияния датчиков» на основе комплементарного фильтра или фильтра Калмана, данные гироскопа и акселерометра успешно корректируют друг друга и обеспечивают высокую точность как краткосрочных, так и долгосрочных измерений.
Однако определение координат (перемещения) путем двойного интегрирования линейного ускорения (dead reckoning), рассчитанного по необработанным данным акселерометра, не отвечает требованиям точности в течение длительных периодов времени. Сам акселерометр обеспечивает чрезвычайно шумные данные, а ошибка при интегрировании квадратично возрастает со временем. Сочетание инерциального отслеживания с другими методами, которые периодически корректируют так называемое проскальзывание акселерометра, помогает решить эту проблему.
Гибридные методы
Поскольку ни один метод не является идеальным, и все они имеют свои недостатки, более разумно комбинировать различные методы отслеживания. Инерциальный мониторинг (IMU) может обеспечить высокую частоту обновления (до 1000 Гц), а оптические методы могут обеспечить стабильную точность в течение длительных периодов времени (коррекция проскальзывания).
Гибридные методы мониторинга основаны на алгоритмах «слияния датчиков», среди которых наиболее известен расширенный фильтр Калмана (EKF).
Как работает маяк SteamVR?
Система слежения HTC Vive состоит из двух базовых станций, оптических датчиков и инерциальных измерительных блоков (IMU) в контроллерах и шлеме. Базовые станции состоят из двух вращающихся лазеров и ряда инфракрасных светодиодов. Один из лазеров вращается вертикально, а другой — горизонтально. Таким образом, лазеры попеременно «сканируют» окружающее пространство. Базовые станции работают синхронно: в любой момент времени только один из четырех лазеров сканирует зону наблюдения. Для синхронизации всей системы между каждым включением лазеров происходит освещение всей среды инфракрасным световым импульсом.
Датчики в контроллерах и шлеме регистрируют все визуальные импульсы от базовых станций и измеряют время между ними. Поскольку частота вращения лазеров известна заранее (60 Гц), углы вращения отдельных лучей могут быть рассчитаны по времени между импульсами. Это дает нам двумерные координаты оптического датчика. Если мы знаем взаимное расположение датчиков на блоке управления, мы можем легко восстановить трехмерное положение блока управления в пространстве (задача PnP). Если две опорные станции видны одновременно, трехмерное положение управляющего устройства может быть рассчитано на основе пересечения двух лучей, что дает более точные результаты, но требует меньше вычислений. Более наглядную демонстрацию процесса отслеживания можно увидеть ниже.
Месяц назад Valve объявила, что откроет свою систему отслеживания для сторонних разработчиков. Подробнее об этом вы можете прочитать здесь.
Какой метод пространственного отслеживания, по вашему мнению, наиболее перспективен для виртуальной/дополненной реальности?
Это первая статья из серии статей о технологиях VR. Если будет интерес, мы будем писать больше статей.
Так называемая проблема PnP (Perspective-n-Point) используется в оптическом слежении для определения положения объекта в пространстве, при этом перспективная проекция объекта в плоскости сенсора камеры используется для определения положения объекта в трехмерном пространстве.
Активные / пассивные локаторы
Активные локаторы имеют тип генератора сигнала в дополнение к подслушивающему устройству. Эти два устройства не обязательно должны быть расположены вместе.
Сонар
SONAR или сонар (звуковая навигация и дистанционное зондирование) — это техника, использующая распространение звука под водой (или иногда в воздухе) для навигации, связи или обнаружения других судов. Существует два типа гидролокаторов — активные и пассивные. Один активный гидролокатор может определять расстояние и азимут, а также измерять радиальную скорость. Однако чисто пассивный гидролокатор может определить местоположение только по прямому пеленгу, хотя анализ движения цели может быть использован для определения местоположения в течение заданного времени. Несколько пассивных гидролокаторов могут использоваться для определения местоположения территории непосредственно путем триангуляции или корреляции.
Местоположение биологического эхо
Дельфины, киты и летучие мыши используют эхолокацию, чтобы обнаружить добычу и избежать препятствий.
Локализация времени прибытия
Используя громкоговорители/звуковые передатчики, которые издают звук в известных местах и в известное время, можно оценить положение цели, оснащенной микрофоном/звуковым приемником, по времени появления звука. Точность обычно низкая, если передатчик и приемник находятся на открытом воздухе и есть помехи. 16
Сейсмические исследования
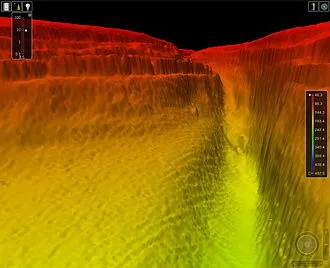
При сейсмической разведке для измерения подземных структур генерируются звуковые волны. Исходные волны обычно возникают в результате ударов вблизи земли или воды, как правило, от падающих грузов, вибрирующих грузовиков или взрывчатых веществ. Данные собираются с помощью геофонов, а затем сохраняются и обрабатываются компьютером. Современные технологии позволяют создавать с помощью такого оборудования трехмерные изображения подземных скальных структур.
Схема на рисунке (b) используется для обнаружения повреждений в кабельных линиях, когда между одной из жил и оболочкой кабеля в месте повреждения возникает устойчивое короткое замыкание.
Как работает эхолокация?
Для того чтобы использовать эхолокацию, животное должно сначала произвести некий звуковой стимул. Звуки обычно представляют собой высокочастотные тона, ультразвуковые звуки или щелкающие звуки. Затем они слушают эхо от излучаемых звуковых волн, которые отражаются от объектов в окружающей среде.
Летучие мыши и другие животные, использующие эхолокацию, особенно хорошо ориентируются в характеристиках этого эха. Если звук возвращается быстро, животное знает, что объект ближе; если звук громче, оно знает, что объект больше. Даже высота эха помогает животному почувствовать свое окружение. Объект, движущийся по направлению к нему, издает звук более высокого тона, а объекты, движущиеся в противоположном направлении, возвращают эхо более низкого тона.
Исследования эхолокационных сигналов обнаружили генетическое сходство между видами, использующими эхолокацию. В частности, косатки и летучие мыши имеют общие специфические изменения в группе из 18 генов, связанных с развитием кохлеарного ганглия (группы нейронов, отвечающих за передачу информации от уха к мозгу) (1).
Эхолокация больше не является уникальным явлением в природе. Современные технологии переняли эту концепцию у таких систем, как гидролокатор, используемый для навигации подводных лодок, и ультразвук, применяемый в медицине для отображения изображений тела.
Эхолокация животных
Так же как люди видят, отражая свет, животные с эхолокацией могут «видеть», отражая звук. Шея летучей мыши имеет специальные мышцы, которые позволяют ей излучать ультразвук, а уши имеют уникальные складки, которые делают их чрезвычайно чувствительными к направлению звука. Во время ночной охоты летучие мыши издают серию щелкающих и визжащих звуков, иногда настолько высокочастотных, что человеческое ухо не может их различить. Когда звук достигает объекта, он отражается обратно, создавая эхо и заставляя летучую мышь осознать свое окружение. Это помогает летучей мыши, например, поймать насекомое в полете.
Исследования социальной коммуникации летучих мышей показывают, что летучие мыши используют эхолокацию для реагирования на определенные социальные ситуации, а также для различения пола или человека. Самцы летучих мышей в дикой природе иногда различают приближающихся летучих мышей только по их эхолокационным сигналам, используя агрессивные призывы для приближения к другим самцам и ухаживая после того, как услышат эхолокационные призывы самок (2).
Зубатые киты, такие как дельфины и кашалоты, используют эхолокацию для навигации в темных, мутных водах глубоко под поверхностью океана. Эхолокационные дельфины и киты издают ультразвуковые щелчки через носовые ходы, посылая звуки в морскую среду, чтобы находить и различать объекты вблизи или на расстоянии.
Голова кита, одна из самых больших анатомических структур в животном мире, заполнена спермацетом (веществом, похожим на воск), от которого звуковые волны отражаются от огромной пластины в черепе. Сфокусированные звуковые волны в узком пучке обеспечивают более точную эхолокацию даже на расстоянии до 60 километров. Белухи используют мягкую, круглую часть лба (так называемую «акустическую линзу») для эхолокации и фокусируют сигналы так же, как и кашалоты (3).
Эхолокация человека
Эхолокация обычно ассоциируется с нечеловеческими животными, такими как летучие мыши и дельфины, но некоторые люди также научились этому навыку. Хотя они не могут слышать высокочастотные ультразвуковые волны, которые летучие мыши используют для эхолокации, некоторые слепые люди научились использовать эти звуки и слышать отраженное эхо, чтобы лучше понимать окружающую обстановку. Эксперименты с человеческой эхолокацией показали, что люди, обученные «человеческому сонару», показывают лучшие результаты и лучше обнаруживают цели, когда издают звуки на более высоких спектральных частотах. Другие исследователи обнаружили, что эхолокация человека фактически активизирует зрительный мозг (4, 5).
Вероятно, самым известным экспертом по человеческой эхолокации является Дэниел Киш, президент организации World Access for the Blind и эксперт по человеческой эхолокации. Киш, который слеп с 13 месяцев, использует звук своего рта для ориентации, слушая эхо, отраженное от поверхностей и предметов вокруг него. Он путешествует по миру, обучая других эхолокации, и сыграл важную роль в повышении осведомленности о человеческой эхолокации и привлечении внимания научного сообщества. В интервью журналу Smithsonian Киш описал свой уникальный опыт эхолокации (6, 7, 8):
Мигает. Вы действительно имеете непрерывный вид, как будто освещаете темную сцену вспышкой. С каждой вспышкой он приобретает четкость и резкость, своего рода трехмерная геометрия вне фокуса. Она трехмерна, имеет трехмерную перспективу и ощущение пространства и пространственных отношений. У вас есть глубина структуры, расположение и масштаб. У вас также довольно сильное чувство плотности и текстуры, что похоже на вспышки сонара, если хотите.
Более 15 лет он работал журналистом в области экологии и науки. Он пишет о науке, культуре, космосе и устойчивом развитии. Внештатный писатель для сайта «Знание — свет».